NatureScot Research Report 909 - Using a collision risk model to assess bird collision risks for onshore wind farms
Published: 2024
Authors: William Band
Cite as: Band, W. 2024. Using a collision risk model to assess bird collision risks for onshore wind farms. NatureScot Research Report 909.
Disclaimer
This report was written in 2016, but not published until 2024. Some information may no longer be current.
Contents
- Background
- Main findings
- 1. Introduction
- 2. Information needed
- 3. Collision risk model
- 4. Collision risk model spreadsheet
- 5. Stage A: Flight activity
- 6. Stage B: Estimating the number of bird flights through rotors
- 7. Stage C: Probability of collision for a single rotor transit
- 8. Stage D: Multiplying to yield expected collisions per year
- 9. Stage E: Applying the avoidance rate
- 10. Stage F: Expressing uncertainty
- References
- Annexes
Background
Environmental statements for onshore wind farms should include a quantitative estimate of collision risk for all bird species present on the site for which the level of risk has the potential to be important. This should include a view on the significance of that collision risk on the respective bird populations.
This report sets out a method to standardise the approach to collision risk assessment for onshore windfarms, to increase the transparency of calculations and to promote greater confidence in the results. It also enables estimates from different windfarms to be more easily compared and combined to facilitate cumulative assessment and enable collision risk assessment to be used as a tool in selecting the best areas for onshore windfarm development. It includes a standard approach and a methodology for including birds on migration, for which survey data on flight activity may be limited.
Main findings
The report describes the information needed and how to use that information to arrive at an estimate of collision risk. It describes a spreadsheet which enables the necessary calculations to be performed in a standardised way. To use the methods, data is required for:
- Bird behaviour – avoidance and attraction to the wind farm.
- Bird survey – Flight density, flight height and distribution around the proposed site.
- Turbine details – rotor diameter, blade size and variation, blade pitch and variation and rotor speed.
- Bird details – body length, wingspan and flight speed.
The report includes a worked example to illustrate the process.
1. Introduction
Onshore windfarms may have several effects on bird populations:
- Displacement – birds may partially or totally avoid a windfarm and hence be displaced from the underlying habitat.
- Barrier effects – birds may use more circuitous routes to fly between, for example, breeding and foraging grounds, and thus use up more energy to acquire food.
- Habitat effects – birds may be attracted or displaced by changes in habitats and prey abundance because of the windfarm.
- Collision risk – birds may be injured or killed by an encounter or collision with turbines or rotor blades.
This guidance relates to the last of these, collision risk.
An environmental statement for an onshore wind farm should include a quantitative estimate of collision risk for all bird species present on the site for which the level of risk has the potential to be important. The environmental statement should include a view on the significance of that collision risk on the respective bird populations.
The aim of this report is to promote a standardised approach to collision risk assessment for onshore wind farms, to increase the transparency of calculations and to promote greater confidence in the results. It will enable estimates from different wind farms to be more easily compared and combined to facilitate cumulative assessment. It may also enable collision risk assessment to be used as a tool in selecting the best areas for onshore wind farm development.
The report describes the information needed and how to use that information to arrive at an estimate of collision risk. It is accompanied by a spreadsheet which enables the necessary calculations to be performed in a standardised way.
2. Information needed
Figure 1 shows the information needed to estimate collision mortality:
- Information derived from bird survey - on the number of birds flying through or around the site, and their flight height.
- Bird behaviour - prediction of likely change of behaviour of birds, e.g. in avoiding, or being attracted to, the wind farm.
- Turbine details - physical details on the number, size and rotation speed of turbine blades.
- Bird details - physical details on bird size and flight speed.
This report sets out how that information should be presented and used within a collision model, and how the outputs from that model should be expressed, i.e. the components in the dashed ‘box’ in Figure 1. The guidance does not cover:
- bird survey methods – for which there are various advisory sources, notably SNH's guidance Recommended bird survey methods to inform impact assessment on onshore wind farms; and
- bird behaviour – while it outlines how an avoidance rate factor should be used in the collision risk calculation, the guidance leaves it to other sources based on actual monitoring of bird collisions at wind farms to advise on what avoidance rates should be used, such as SNH's guidance on Avoidance rates for the onshore SNH wind farm collision risk model.
Figure 1 also indicates the key outputs from the model, the collision risk, expressed in terms of the likely number of birds per month or per year which will collide with the wind farm, and the range of uncertainty surrounding that estimate. These should be accompanied by a clear statement of the assumptions on avoidance made in arriving at that estimate as such assumptions are often critical to the magnitude of the collision estimate. This report includes advice on how these outputs should be presented.
Note that the collision risk model stops at an assessment of collision risk. Where collision risk is not negligible, a developer will need to further consider the significance of the predicted mortality - which will depend on the sensitivity of the bird population, and the degree of protection afforded by legislation and any protected sites in the vicinity which may be designated for that species.
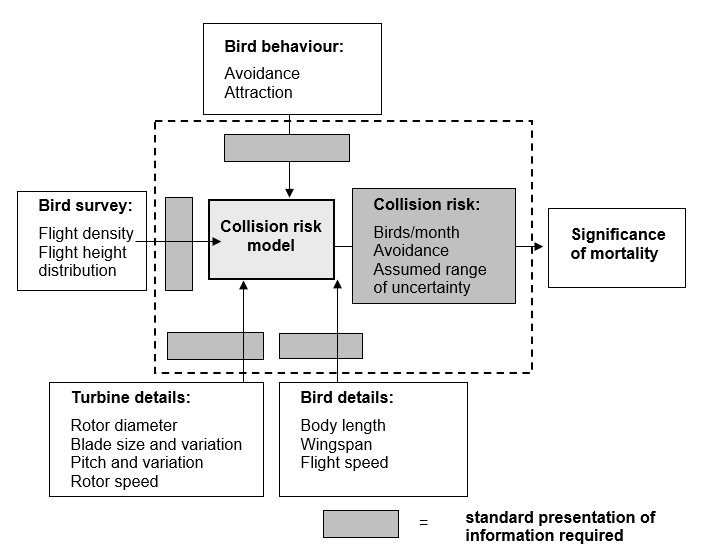
Figure 1. Structure of the collision risk model.
Click for a full description
Figure 1 is a flow chart describing model inputs and outputs. Input data is on bird behaviour, i.e. avoidance or attraction to the site, bird survey, i.e. flight density, height and distribution, turbine details, i.e. rotor diameter, blade size and variation, blade pitch and variation and rotor speed, and details of the bird species, i.e. their body length, wingspan and flight speed. Data is analysed in terms of the number of birds per month, avoidance behaviour and an assumed range of uncertainty, and the output results presented as the significance of the risk of mortality occuring. Input data needs to be in a standardised form to allow the calculations to be made accurately.
3. Collision risk model
The approach adopted follows in general terms that developed by Band et al. (2007) and Band (2000) promoted in guidance previously published by SNH.
Guidance on a similar approach for offshore wind farms has already been published by The Crown Estate (Band, 2012). The offshore approach differs from onshore mainly in the methods used to gather and present information on flight activity, given that direct observations of birds from key vantage points are not usually possible in the marine environment. The offshore methodology also provides for the use of flight height distribution data as, in the marine environment, flight heights are often strongly skewed towards heights at or below rotor level. SNH advice is that in the onshore environment, information on flight height distributions is likely to be insufficiently robust to enable it to be used reliably in such an extended model.
The Collision Risk Model estimates the number of collisions through the following stages (Figure 2):
Stage A Flight activity - using bird survey data to establish the density of flying birds in the vicinity of the turbines, and the proportion flying at a risk height, between the lowest and highest points of the rotors.
Stage B Number of flights through rotors – makes an estimate, based on the bird density and proportion at risk height, of the potential number of bird passages through rotors in the period in question. The initial assumption is that birds will continue to make flights within the area at the same intensity as before.
Stage C Probability of collision for a single transit - calculates the probability of collision during a single bird rotor transit.
Stage D Expected collisions per year - multiplies the outputs of stage B and C to yield the potential collision rate for the bird species in question, assuming current levels of bird use of the site but allowing for the proportion of time that turbines are not operational.
Stage E Allowing for avoidance and attraction - takes account of the proportion of birds likely to avoid the wind farm or its turbines, either because they have been displaced from the site or because they take evasive action or are attracted to the wind farm, e.g. in response to changing habitats.
Thus, expected collisions =

Figure 2. The collision risk model stages.
Click for a full description
Figure 2 is a flow chart presenting the five stages of the model. Data in flight activity is used to estimate the number of single transits through the rotor area, the average probability of collision during each of these transits, then multiplied by the proportion of the turbine operational time (Qop) and the avoidance factor.
Each of these five stages is described below followed by a further stage, stage F, which describes how to express the uncertainty surrounding a collision risk estimate.
3.1 General features of the collision risk model
Risk is turbine-based. Risk in this model is calculated directly from the rotor parameters and the flight activity in the airspace surrounding each turbine. Some practitioners have used an approach which considers the risk to each bird passing through a windfarm, taking account of the layout and spacing of turbines to calculate the likelihood of encountering one or more turbines and the resulting risk. This is unnecessary if one focuses, as in this report, on the risk resulting from each turbine operating within its own airspace within which there is a known (or projected) level of flight activity.
Relationship to previous guidance. The approach to quantifying and expressing flight activity in this report differs from that set out in the earlier SNH collision risk model guidance. These offered two, alternative approaches for calculating the likely number of flights through turbines: the first used observations of bird flux passing through a vertical ‘risk window’ enveloping the turbines and the second assessed the ‘bird occupancy’ of the volume of airspace occupied by the whole wind farm. Both these methods are mathematically equivalent to the method described below and in the accompanying spreadsheet, in which the core measures are the density of flying birds per unit horizontal area of the wind farm and the proportion flying at turbine height. The current approach leads to the same results and avoids the need to identify arbitrary risk windows or to define an arbitrary wind farm boundary. The basic model and spreadsheet used to calculate the risk for a single bird flight through a rotor are also as in the earlier guidance (though subject to minor refinement). Thus, collision risk estimates resulting from application of this report should not differ substantively from those deriving from correct application of the earlier SNH guidance.
The oblique approach is simplified. There is a simplification involved in assuming that the probability of collision for any bird passing through a rotor is the same regardless of the direction of flight. In fact, the collision risk depends to some extent on a bird’s angle of approach, determined by the direction of its flight and the orientation of the turbine blades. A bird approaching a turbine at an oblique angle is exposed both to a reduced probability of flying through the rotor because the rotor presents an elliptical rather than circular cross-section and an increased risk of collision if it does so. This model assumes that these two factors exactly offset each other, such that all bird transits can be treated as if making a perpendicular approach to the rotor. This enables Stages B and C to be undertaken sequentially. A more exact approach would require estimating the number of flights from each direction, applying the collision probability for that direction, and summing the probability over all directions. Annex 1 provides a fuller explanation of this issue and the justification for adopting the simplified approach. It should be recognised that this simplification leads to some underestimation of collision risk, which may be as much as 10% for large birds.
Best estimate not worst-case. This report does not recommend use of ‘worst case’ assumptions at every stage. These can lead to an overly pessimistic result and one in which the source of the difficulty is often concealed. Rather, it is recommended that ‘best estimates’ are deployed, and with them an analysis of the uncertainty or variability surrounding each estimate and the range within which the collision risk can be assessed with confidence. In stating such a range, the aspiration should be that there is 95% likelihood that the collision risk falls within the specified range. However, given the uncertainties and variability in source data and the limited firm information on bird avoidance behaviour, it seems likely that for many aspects the range of uncertainty may have to be the product of expert judgement rather than derived from statistical analysis.
Spatial exploration of risk. While this report and the accompanying spreadsheet are written around quantifying the collision risk from an entire wind farm, it can equally be applied at the level of a subgroup of turbines or an individual turbine. If the data on flight activity is sufficiently robust to allow such discrimination, this facilitates examination of risk on a spatial basis. Collision risk is directly proportional to flight activity which is dependent on bird density at rotor risk height. Siting wind farms, or groups of turbines, in areas of lower bird density is likely to yield a proportionately lower collision risk.
4. Collision risk model spreadsheet
This report is accompanied by a spreadsheet which enables user to work easily through stages A to E of the process. It comprises five worksheets.
Collision risk. This is the ‘master’ spreadsheet into which all required data is entered (except blade profile), and which presents the collision risk output. An illustration of this spreadsheet, as used for the worked example, is reproduced at Annex 2.
Data is entered into the top section of the spreadsheet. It is brigaded under three headings: ‘Bird data’, ‘Wind farm data’ and ‘Turbine data’. The only data which requires input elsewhere is in the ‘Blade profile’ sheet where, if the data is available, the blade profile may be replaced by a more specific one for the turbine blades used.
The remainder of the sheet is organised according to Stages A-E of the process, making clear the parameters used in each stage. It provides the outputs from each stage:
- Stage B – the estimated number of potential bird transits through rotors of the wind farm.
- Stage C – the probability of collision during a single bird rotor transit.
- Stage D – potential collision mortality for the bird species, assuming current use of the site and no avoiding action is taken.
- Stage E – potential collision mortality for the bird species, taking avoidance and other likely behaviour change into account.
The source data used for each input should be listed in full within the environmental statement.
Blade profile is a table giving the chord width of the blade, relative to its maximum chord width, at points along the blade length. 21 data points are required, at points r/R = 0, 0.05, 0.1, 0.15 etc. up to r/R=1 where r is the distance out from the hub and R is the blade length. The value for r/R=0 is not used in the calculation as this will be the hub.
Daylight and night hours. Given the input latitude, this sheet computes the daylight and night hours in each month within which there could potentially be bird activity.
Large array correction. This sheet enables a correction to be made for large arrays where the collision rate is such that bird density might significantly decline as birds pass through the wind farm. These correction factors are then applied to the collision rate estimates in Sheet ‘Collision risk’. In most circumstances the results will demonstrate that a large array correction is not significant and can be ignored.
Migrant collision risk. Annex 3 describes how use of the model may be adapted when assessing the collision risk to birds on migration when there may be limited bird survey information on flight activity. The ‘Migrant collision risk’ sheet uses information in a different form on the density of birds passing through the wind farm and provides a different route to calculating the projected number of rotor transits. It is activated by setting the button in column one of the ‘Collision risk’ sheet from ‘Normal approach’ to ‘Birds on migration’. Calculations in the ‘Migrant collision risk’ sheet then replace that in Stages A and B of the normal approach. The remainder of the calculation in Stages C, D and E proceed within the ‘Collision risk’ sheet as usual.
This report describes in detail the input parameters, and their units, along with the key outputs from the model for each of the five stages of the calculation. For convenience a comprehensive list of input parameters is repeated in the table at Annex 4, brigaded and ordered as in the input section of the spreadsheet, under its three headings ‘Bird data’ ‘Wind farm data’ and ‘Turbine data’. Care is needed throughout to use the correct units as specified. Standard SI units are generally used, e.g. metres, seconds, however input figures for bird density are required in birds per square kilometre (km-2) which are the units in which most survey data is expressed. Rotation speed is input in revolutions per minute (rpm). The spreadsheet includes the appropriate formulae to convert these to SI units. The outputs, both potential rotor transits and number of collisions, are given per month and per year.
4.1 Spreadsheet protection
The spreadsheet uses Visual Basic functions to perform the calculations associated with the collision risk for single transits. For these to work, the spreadsheet must be macro-enabled. Some corporate systems routinely disable macros as a computer security precaution so these may need to be enabled manually.
To protect against unintentional overwriting of formulae, or entry of input data other than in the ‘Collision Risk’ sheet, each of the worksheets is ‘protected’. The spreadsheet is fully usable in this state, with data entry allowed in the sections coloured orange.
5. Stage A: Flight activity
This stage estimates the number of flights which, in the absence of birds being displaced or taking other avoiding action or being attracted to the wind farm, would potentially be at risk from the turbines. It requires field data to determine levels of flight activity within the proposed wind farm.
5.1 Estimating flight activity
Two key parameters derived from survey observations are needed to describe the degree of flight activity:
- Areal bird density DA is the number of birds per unit area, in flight at any height at a given point in time. DA is most usually expressed per square kilometre (km2). For use in the formulae, it must be divided by 106 to yield DA in SI units, i.e. birds m-2. The spreadsheet does this division. Note that areal bird density is different from the ‘true density’ Dv that is expressed in terms of birds per cubic meter (m3) of air space, and which is calculated from DA in stage B.
- Proportion of birds flying at risk height (Q2R) This is the proportion of birds flying at a height at which they might collide with a rotor, i.e. between the lowest and highest points of a rotor, measured relative to the rotor base.
Stating the bird density per unit area provides a better basis for comparison of risk assessments and for cumulative risk assessment than would be the case if only bird flight density at rotor height were stated. It also provides a level of data which can be re-interpreted in the future, for example if a new generation of larger turbines came available. Such overall bird density information does not embody assumptions or uncertainties relating to flight height distribution.
Where one of the aims of a collision risk assessment is to choose a windfarm location and design which minimises bird collision risks, the starting point should be to select areas with the lowest density of the bird species vulnerable to collision. For large sites, or for consideration of collision risks at a strategic level, it may be possible to discriminate between different zones of the site or areas with different bird densities. Such information will be helpful in identifying preferred zones for development however care should be taken to ensure that any differences are statistically significant. For most development sites, the statistical variation in the data derived from survey is likely to mask any within-site variations in bird density.
While the approach to collision risk in this report does not require definition of a wind farm boundary, and the area of the wind farm area does not feature in the calculations, it is important to be clear as to the boundary within which an estimate of bird density applies. It is usually recommended that survey is undertaken beyond the wind farm footprint to ensure that any bird density estimates for the wind farm site are adequately representative of the area as a whole.
An environmental statement should clearly state the bird density used in collision calculations, expressed as birds per km2 across the site, including birds flying at all heights. It should also state the proportion of birds estimated to be flying within the risk height band, i.e. between the lowest and highest points of the rotors. Where survey information leads to a range of perspectives on bird density, e.g. including or excluding data for buffer areas, the environmental statement should make clear which survey data has been used, and why. Section 5.4: Flight heights describe how information on flight heights should be presented.
5.2 Other ways of expressing flight activity
Flight activity may also be expressed in terms of ‘bird occupancy’ or ‘flux’.
Bird occupancy applies to a given volume of airspace and is simply the number of birds on average occupying that volume. Thus, in a volume of air for which the bird density is uniform, bird occupancy (birds) = true density (birds/m3) x volume (m3). Or, if the airspace under consideration is all the airspace above a given area of land then:
bird occupancy (birds) = areal density (birds / m2) x area (m2)
Sometimes bird occupancy is stated in bird-seconds per year as a convenient way of expressing low levels of bird occupancy, extrapolating from observations during watch periods to estimate total flight time during a year. Bird-seconds are a combined measure of both the number of birds aloft and the duration of their flights: two birds in flight simultaneously or one bird in flight for two seconds both count as two bird-seconds. As there are 31.6 x 106 seconds in a year, an occupancy of 31.6 x 106 bird-seconds per year in an airspace means that on average, there is one bird occupying that airspace. Conversely, a bird occupancy of (b) bird-seconds per year means an average occupancy of b / (31.6 x 106) birds in that airspace.
To convert bird occupancy (in bird-seconds per year) of an area A (m2) to areal bird density (in birds m-2), use the inverse of the above formula:
DA = (b/31.6 x 106) / A birds m-2
Bird flux is the number of birds crossing an imaginary surface within the airspace, expressed as birds/sec or birds/sec per m2 of that surface. It is sometimes measured in the field in terms of a Mean Traffic Rate (MTR) which is the number of birds flying per hour across an imaginary horizontal line of length 1 km. If all birds crossing that imaginary line, as viewed from above or below, are recorded at any flight height up to height (h) metres, then the Mean Traffic Rate is the total number of birds (N) crossing that line expressed as birds/km/hour. MTR must be divided by 3600 (seconds in an hour) and 1000 (metres in a km) to express bird flux in birds/sec per metre of baseline, and divided by the height (h) to get the bird flux in birds/ sec /m2.
Bird flux is directly related to bird density but depends on the speed of the birds: if they were stationary, there would be no flux. Total bird flux (FL) includes flights at any height, in either direction across the baseline and is calculated as:
FL = (2/π) DA v birds/sec per metre of baseline
where DA is the areal density (birds m-2, flying at any height) and v is the speed of the birds in m/sec. Annex 5 sets out the derivation of this formula and fuller information on converting between flux and bird density. Flux is directional: for a given density of birds moving in random horizontal directions, a vertical ‘window’ will intercept more birds flying perpendicular to the area than birds flying at an oblique angle, to which the window will appear narrower. The (2/p) factor takes account of this angle-dependence.
To convert flux (in birds/sec per metre of baseline) to areal density (in birds m-2), use the inverse of the above formula:
DA = FL (π/2) / v birds m-2
5.3 Deriving flight activity from survey
How flight activity is expressed in output from surveys often reflects the type of survey method deployed.
Vantage point survey is usually the most appropriate way to record daytime flight behaviour, location and levels of flight activity on a proposed onshore wind farm site. Such a survey records, from a set of key vantage points, all bird flights and their duration within a defined sector of the wind farm airspace, leading to a measure of bird occupancy in that airspace. Bird occupancy is readily converted to areal bird density (per m2) by dividing by the area scanned from the vantage point (see 5.2: bird occupancy).
SNH has published a detailed methods statement for Vantage Point watches as an appendix to its guidance on Recommended bird survey methods to inform impact assessment on onshore wind farms.
A typical vantage point watch of the airspace above an area (A) might observe that, within a watch period of duration (t) seconds, birds of a certain species are in flight for (b) bird-seconds noting, as before, that two birds aloft for one second or one bird for two seconds both count as two bird-seconds. The average bird occupancy of the airspace above area (A) is then b/t; and the average areal bird density DA within that volume is b/ (t * A).
Where watch data is gathered from more than one vantage point, and the watch areas overlap, then there will be a need to combine the data in a way which does not double-count bird presence in the overlap areas. Annex 6 outlines some common situations and suggests how these may be best tackled.
5.4 Flight heights
There is only a risk of collision with turbine blades at flight heights between the lowest and highest points of the rotors, a distance equivalent to twice the length of a single blade. The data on bird density should be accompanied by an estimate of the proportion of birds flying within the risk height band for the proposed wind farm.
Accurate data on flight heights can be difficult to capture, usually relying on observers being able to estimate flight heights. The accuracy of such estimates decreases with height. Aerial survey in the past has not normally yielded flight height information. Observer training is therefore essential, including testing against objects at known heights to establish observer competence. High-definition digital photography systems are providing increasingly accurate information on flight height in a marine environment and may be of some use onshore.
For some species, survey information at a site may be insufficient to provide a reasonably precise figure for the proportion of birds flying at risk height. Where this is the case, it may be possible to use a generic view of flight height behaviour obtained by combining flight height information gathered from surveys at different sites. In combining results from different surveys, care is needed to place greatest weight on those with the most robust data, which may imply discarding data with poor levels of precision. The generic information should be reviewed, assessing whether it provides more precise information than the site-based data and whether the site-based data, if limited, is nonetheless compatible with the generic information. If so, then the generic information should be used. Care must be taken not to mask any feature of flight behaviour at the site in question which could reflect a genuine difference of behaviour due to environmental variables or the specific use of the site made by the birds. For some species typical flight heights are dependent on the season and, in such a case, it will be best to use seasonally dependent typical flight heights in assessing collision risk for each month rather than average flight heights across the year.
Often, at the time of undertaking field survey, the turbines to be used have not been selected. As turbine models may vary in their risk height, estimates of the proportion of birds flying at risk height should reflect the range of potential turbine heights. Survey methods should be designed to ensure that data are available to inform all potential options.
The central estimate of the proportion of birds flying at risk height should be based on a straightforward analysis of flight height survey data without any ‘margin of uncertainty’ added to the risk height range. In addition, alternative estimates should also be presented, reflecting the possibility of a higher or lower proportion of birds flying at risk height. Confidence intervals on flight height data should be used where these are available from the survey information otherwise a realistic view should be taken of the potential for mis-estimation and error in flight height observations by field observers. Confidence intervals should be aimed at around 95% confidence that the true result lies within that range. In some circumstances, this may be no more than an expert view based on an understanding of the limitations of the survey techniques.
The environmental statement should state the proportion of birds estimated to be flying within the risk height band, i.e. the band between the lowest point of the rotors and the highest point of the rotors based on survey information at the site and used to estimate collision risk.
5.5 Daylight hours and nocturnal activity
Most bird survey is undertaken by day and it is generally assumed that sample levels of flight activity persist throughout daylight hours. Daylight hours depend both on time of year and on latitude. Forsythe et al. (1995) provide a ready reckoner for daylight hours which is reproduced in the ‘Daylight and night hours’ sheet of the CRM spreadsheet. Inputting the latitude of the site in the ‘Collision risk’ sheet triggers the calculations which returns the ‘Collision risk’ sheet the appropriate number of daylight and night hours in each month.
There is considerable uncertainty about levels of bird flight activity by night. A rating of one is given to represent hardly any flight activity at night and five for much flight activity at night. Figures used in the collision model should take both day and night flights into account. Daytime activity should be based on field survey and, if night-time survey is not possible, expert assessment of likely levels of nocturnal activity for the species in question should be sought, including at other sites if not at this site. These rankings are translated in the spreadsheet to levels of activity Fnight, which are respectively 0%, 25%, 50%, 75% and 100% of daytime activity. These percentages are a simple way of quantifying the rankings for use in collision modelling and may, to some extent, be precautionary. There are no standard expert rankings available for terrestrial species and levels of activity may vary from season-to-season. They may also differ between activity at breeding sites and activity in foraging areas. Some species are particularly active during dawn and dusk, or extended twilight periods, or in locations where there is ambient wind farm lighting. When expressing the output of the collision risk assessment, the uncertainty surrounding flight activity should reflect the degree of confidence (or lack of confidence) in the flight activity information.
Information on bird density, proportion at risk height, nocturnal activity, and day and night hours provides the input to Stage B.
Note that the parameters in Table 1 are only required if the ‘normal approach’ is used to estimate the potential number of rotor transits. If the ‘birds on migration’ method is used, these parameters are ignored as they are not required.
| Symbol | Description | Units | Notes |
|---|---|---|---|
| DA | Bird density (day) | birds/km2 | Average number of birds in flight in daytime at any height, per square kilometre, as derived from field observation. Data should be entered for each month. If only a year average is available, enter the value for all 12 months: individual monthly figures may not be meaningful but the year average and totals will be valid. |
| h | Hub height | m | The height above ground of the rotor hub. |
| R | Rotor radius | m | The length of the rotor blades, from axis to tip |
| Q2R | Proportion at rotor height | % | Derived from bird survey in the light of the projected rotor diameter and rotor hub height. |
| - | Nocturnal activity ranking | 1 to 5 | 1 = hardly any night activity: 5 = as active at night as by day. |
| - | Latitude of wind farm | degrees latitude | Includes degrees and minutes with decimal places; this data is used to work out daylight hours in each month. |
| Symbol | Description | Notes |
|---|---|---|
| - | Risk height range | Based on the hub height (h) and rotor radius(R), the range of flight heights h-R to h+R within which collisions could occur. |
| fnight | Nocturnal activity factor | The spreadsheet converts the nocturnal activity ranking one to five to an assumed factor of 0% / 25% / 50% / 75% /100% daytime activity. It should be noted that this translation is not based on flight activity evidence but is only an expert judgement on how the rankings should be interpreted. |
| tday | Daylight hours | The spreadsheet uses the wind farm latitude to calculate daylight and night-time hours for each month, and the total for a year. |
| tnight | Night-time hours | The spreadsheet uses the wind farm latitude to calculate daylight and night-time hours for each month, and the total for a year. |
6. Stage B: Estimating the number of bird flights through rotors
The following section describes the calculation of the number of flights that are likely to pass through the rotors (Figure 3).
The total number of bird transits expected through rotors is proportional to the number (T) and cross-sectional area (πR2) of the rotors, and to the density (Dv) of birds in the airspace at risk height. Dv is obtained by multiplying the areal density, i.e. the density of birds per unit area, looking down from above, by the proportion of birds Q2R which are flying at risk height, i.e. between minimum and maximum rotor heights, and dividing by 2R to convert to a volume density (Figure 3), i.e.
Dv = DA Q2R / 2R
The number of bird transits is also proportional to the flight speed of the birds, i.e. faster birds travel further in unit time so pass through more rotors. The number of transits in a time (t) is estimated as:
Number of transits = v * (DA Q2R / 2R) * (T πR2) * (tday + fnight tnight)
where tday is the daylight time in daylight hours within the time (t), tnight is the night-time time activity and fnight is the degree of bird activity at night as a proportion of daytime activity. Annex 4 provides a more detailed derivation of equations (2) and (3). The spreadsheet performs this calculation for each month, if monthly data on bird density is available.
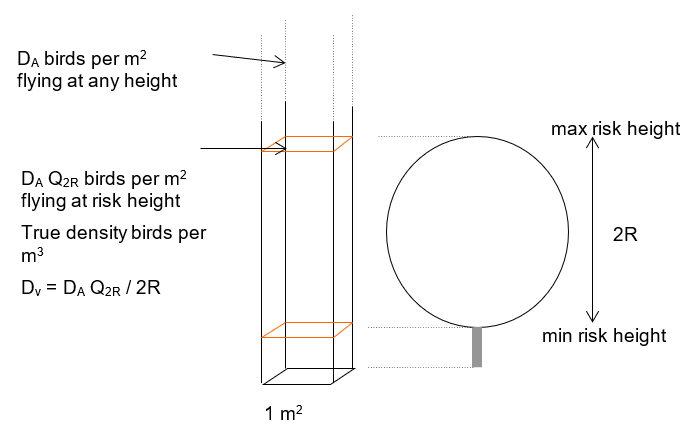
Figure 3. Birds flying at risk height.
Click for a full description
Figure 3 is a schematic presenting calculation of the number of birds flying at risk height. It includes a column representing the full height of a turbine but apportioned into the central risk zone estimated by the full sweep of the rotors (2Z), and areas above and below this which are discounted as a risk. Calculation of the number of birds at risk is presented by the formula Dv = DA Q2R / 2R, which is the number of birds flying at any height multiplied by the proportion of birds flying at risk height (as derived by survey) divided by the rotor sweep area.
A key output within the collision risk assessment should be a clear statement of the potential number of bird transits per month and per year through the wind farm turbines, assuming birds take no avoiding action. The collision risk is directly proportional to the potential number of bird transits.
Stage B draws on the figures for bird density (DA), the proportion at risk height (Q2R), the nocturnal activity factor fnight and the figures for monthly daylight and night hours as established in Stage A. Table 3 sets out the information required for this stage and Table 4 summarises the outputs.
For flight speed, a typical mean flight speed as given in standard references will usually be adequate. However, where there is a need to explore the collision risk arising from different types of bird behaviour involving very different flight speeds, e.g. pursuit, or foraging, the collision risk calculation should separate out the risk for those birds engaged in each behaviour and provide a sum of their collisions risk, as this varies with flight speed in a non-linear way.
The ‘Birds on migration’ method also uses the calculation of the total frontal area of the rotors but does not at this stage require flight speed.
| Symbol | Description | Units | Notes |
|---|---|---|---|
| T | Number of turbines | - | - |
| R | Rotor radius | m | measured from rotor axis to blade tip |
| v | Flight speed | m/sec | bird speed, relative to the ground |
| Symbol | Description | Notes |
|---|---|---|
| - | Total rotor frontal area | The total cross-sectional area of all the rotors (TπR2). If the size and number of turbines is not known, a figure may be entered directly in this sheet for the ‘total rotor frontal area’. This may be amenable to a better estimate than either the turbine number or size. |
| - | Projected number of bird transits | This is expressed for each month and totalled for a year. |
7. Stage C: Probability of collision for a single rotor transit
This stage uses information on the size and speed of the turbines and physical details on the size and speed of the bird to compute the risk of collision for a bird flying through a rotating rotor. Annex 7 details the model and the derivation of the equations.
A bird is modelled as a flying cross with length, wingspan and speed, and always flying perpendicularly towards the rotor. A bird may be ‘gliding’, i.e. with the arms of the cross fixed, or ‘flapping’, i.e. occupying a space similar to that of a spinning top with the length of the bird being the axis of spin. ‘Gliding’ flight has a marginally lower collision risk than ‘flapping’ flight, notably for passage at points level with the rotor hub where the wings lie parallel with potentially colliding blades. However, the difference is rarely sufficient to warrant detailed consideration of different bird behaviours; the flight type used should be that which best typifies most flights for the species in question.
Rotor blades are assumed to be laminar with zero blade thickness but have length, a chord width which varies along the length of the blade tapering towards the tip, and a pitch angle, i.e. the angle between the blade and the rotor plane, which also varies along the length of the blade. Due to commercial sensitivities by blade manufacturers, some of this detailed information may not be readily available for each make/model of blade and generic information may have to be used.
With these simplifications, the model calculates the risk of collision between the bird and the rotor blades (see Box 1). This has a number of important limitations:
- Stationary infrastructure. It is assumed that birds can avoid stationary infrastructure so no account is taken of the turbine towers or the blades when stationary. While this may be a valid assumption in clear daylight conditions, it may not be wholly true at night or in conditions of poor visibility. The model may therefore underestimate collision risk in these conditions.
- Turbulence. No account is taken of the effects on a bird’s flight turbulence in the wake of a blade. Observers have seen birds “knocked out of the sky” by turbulence and there is potential for this to increase mortality through disorientation or impact with the ground. The model only takes account of the potential for physical contact between the bird and the turbine blades. The model may underestimate collision risk across the wind farm.
- Slipstream. The model does not take account of any ‘slipstream’ effects whereby the air rushing over the surface of a blade may carry a bird clear of the blade when otherwise it was on a collision course. In this respect, the model may over-estimate collision risk.
- Bird shape. Whilst a cross-shape should represent the main extremities, representing birds as a flying cross is a simplification as real birds are larger. In this respect, the model may underestimate collision risk.
- Flight height distribution. The collision risk model described in this report evaluates the probability of a bird colliding if it passes at random at any point through the rotor disk on a flight path perpendicular to the rotor plane. For some bird species, the points of passage of birds through the rotor are not distributed uniformly across the rotor but may be concentrated at low altitude. This means much of the bird flux through a rotor, and the associated collision risk, will relate to the lower parts of the rotor plane. For such bird species, since it averages risk over the entire rotor including higher-risk areas close to the hub, the basic collision risk model will overestimate the collision risk. The model in use for offshore wind farms (Band, 2012) is similar to this onshore model but, importantly, extends the basic approach so as to take full account of the effects of flight height distribution. Flight height distribution is rarely recorded in a manner that is suitable for the extended model, hence its exclusion from the onshore model.
- Perpendicular approach assumption. The model assumes that the collision probability for oblique angles of approach is the same as for perpendicular approach. In fact, some increase in collision risk should be expected which, taking account of both upwind and downwind flight, may be of order 10% for large birds. In this respect, the model may underestimate collision risk.
This probability is averaged, integrating values over the entire rotor area to yield the average collision risk for a bird making a single flight at any point through the rotor.
Because of the geometry of the blades in relation to the flight direction, the collision risk for upwind flight is higher than for downwind, even if the bird’s flight speed relative to the ground is taken to be the same. This is expressed in the sign in the first term, which is ‘+’ for upwind flight and ‘-‘ for downwind. In practice, birds will fly more slowly relative to the ground in upwind flight than downwind, further widening the difference in risk between upwind and downwind flight (see 7.3: Upwind, downwind). If both upwind and downwind flights are equally likely, it is appropriate to take an average of upwind and downwind collision probabilities.
The ‘Blade profile’ sheet of the CRM spreadsheet accompanying this report provides a collision risk calculator for a single passage through the rotor. It evaluates the probability of collision for a bird making a single passage through a rotor at each radius (r) and angle (φ), in increments from r/R=0.05 out to r/R=1, and at 10-degree intervals of φ. The collision probability is then averaged over the entire area of the rotor disc to obtain the average collision risk for a passage at any point across the rotor (paverage). The calculation is essentially the same as in the spreadsheet referred to in Band (2000) but with refinements to the numerical integration.
| Box 1. Calculating the probability of collision for a single transit |
|---|
| The model uses a probability p of collision for a bird flying through a rotor, at a point in the rotor plane defined by coordinates r, φ : p(r, φ ) = (bΩ/2πv) [| ± c sinγ + α c cosγ | + max ( L, WαF)] where, r = radius of point of passage of bird φ = angle within rotor plane (relative to vertical) of point of passage of bird i.e. φ =0 is top, φ=π is bottom b = number of blades in rotor Ω = angular velocity of rotor (radians/sec) c =chord width of blade γ = pitch angle of blade R = outer rotor radius L = length of bird W = wingspan of bird v = velocity of bird through rotor α = v/rW F = 1 for a flapping bird, or | cos φ | for a gliding bird |
7.1 Rotor rotation speed
Wind turbines currently available are designed to operate at a range of speeds. They do not typically operate below a cut-in speed, usually between 3 and 4 m/sec, then increase in speed with wind speed up to an operating wind speed which may be around 12 m/sec. Thereafter, they maintain a constant operating speed by altering the pitch of the blades until, in extreme conditions, the turbine is shut down for safety.
Collision risk should be evaluated using the turbine rotational speed for an operating turbine. Where turbines operate with a range of rotational speeds, the calculation should be done using a mean operational turbine speed. The mean used should be a measure over time and using an analysis of wind data to enable the likely frequency distribution of turbine speeds to be determined. Allowance is made elsewhere in the calculation (at Stage D) for the proportion of time that a turbine is non-operational, either because of low wind speeds or for maintenance. The mean turbine speed should thus be a mean over operational time only, not including times when the turbine is idling or stationary. Within the typical range of operating turbine speeds, collision risk varies almost linearly with speed so that use of a mean turbine speed is adequate to yield a mean collision risk. Figure 4 shows an example of a turbine with a maximum operating speed of 12.1rpm.
Annex 8 describes how to estimate the mean rotor speed if data are available on the wind frequency distribution for the site, and the cut-in and cut-out wind speeds for the turbine model. If a frequency distribution of turbine speeds is not available, the collision risk may be evaluated using the maximum operating turbine speed. Note though that this will result in a collision risk which is an upper limit rather than an expected mean value.
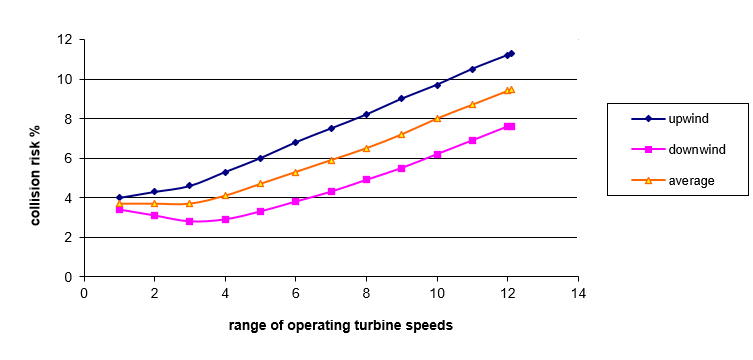
Figure 4. No-avoidance collision risk as a function of turbine speed for a 5MW turbine and a theoretical bird.
Click for a full description
Figure 4 presents a line graph demonstrating differential collision risk depending whether the flights are upwind or downwind. The graph presents proportionately higher risks for upwind flights than downwind flights and shows the average of these as a third line. Collision risk is also shown to increase for all these calculations as the turbine speed increases.
7.2 Accuracy of model
Having regard for the various simplifications in the model, and the potential sources of under- and over-estimation described above, it is judged that this stage of the model should be regarded as indicative of collision probability within around ±20%. These uncertainties are in addition to any uncertainty due to variance in flight activity and other input data (Stage A), or due to uncertainties in avoidance rates (Stage E).
7.3 Upwind, downwind
Two refinements may be made at this stage.
- In taking an average for upwind and downwind flights, the ‘Collision risk’ sheet uses the relative proportion of upwind and downwind flights to weight the respective collision probabilities. By default, the proportion is set to 50% upwind and 50% downwind. There are, however, some circumstances, e.g. migration flights, in which downwind flights may dominate, though flight directions are often far from regular. If field data support the use of differing proportions of upwind and downwind flight, then the proportions may be changed by altering the ‘Proportion of flights upwind’ field in the ‘Collision Risk’ sheet.
- The ‘Collision risk’ sheet also assumes that the bird speed for both upwind and downwind flight is the same, derived from standard references. In fact, it is likely that ground speed downwind will be greater, and ground speed upwind, less than this value. If good data are available, either from field survey or from the literature, to support the use of different up/downwind ground speeds, then this spreadsheet may be run once for each, taking the average of the respective ‘upwind’ and ‘downwind’ outputs to use as the ‘single transit risk. To do this, the user will have to overwrite the formula in that cell.
| Symbol | Description | Units | Notes |
|---|---|---|---|
| b | No of blades | - | - |
| W | Rotation speed | rpm (revolutions per minute) | The formulae uses rotation speed W expressed in radians per second. The spreadsheet converts rpm to radians/sec1. One complete revolution is 2π radians, and there are 60 seconds in a minute, so Ω = (rpm /60) x 2π The rotation speed when generating of most contemporary turbines is variable within a pre-determined range. A time-averaged mean of operational rotor speeds should be used, taking account of the expected frequency of different wind speeds and the resulting rotor speeds. |
| R | Rotor radius | m | Measured from the axis of rotation to blade tip. This value will already have been entered in Stage B. |
| C | Maximum blade chord width | M | The model considers a blade to be a twisted lamina of zero thickness. It has a chord width which varies along the length of the blade as it tapers towards the tip. The value to be entered is the maximum chord width, i.e. the blade width at its widest point. |
| g | Average blade pitch | degrees relative to rotor plane | The blade also has a pitch angle, i.e. the angle between the blade surface and the axis of the rotor. Pitch angle varies along the length of the blade, from a high angle close to the hub to a low pitch angle towards the blade tips. Pitch angle also varies as the pitch is controlled to alter the rotation speed of the turbine. In the model, an average angle is used, representing an average pitch along the blade length. 15-30 degrees is reasonable for a typical large turbine. |
| - | Blade profile | M | The table in worksheet ‘Blade profile’ enables the full tapered profile of a blade to be described. The values are the width of the blade as a proportion of the maximum chord width, at intervals of 1/20 the blade length from r=0 to r=R. The default chord profile in the spreadsheet is 5MW. |
1 Note that the Band 2000 version of this spreadsheet required input of the Rotation period, i.e. the time in seconds required for one full rotation of the rotor, which is the inverse of rotation speed: Rotation period = 60 / (Rotation speed in rpm).
| Symbol | Description Units | - | Notes |
|---|---|---|---|
| - | Species name | - | Used only to reference this spreadsheet |
| L | Length of bird | m | These should be drawn from standard reference works, e.g. Cramp & Simmons (1983) or from BTO Bird Facts. |
| W | Wingspan of bird | m | As above. |
| v | Bird flight speed | m s-1 | This value will already have been entered in Stage B |
| F | Flight type | - | ‘Flapping’ or ‘gliding’. The spreadsheet applies the relevant factor F=0 for flapping flight, or +1 for gliding flight. |
| - | Proportion of flights upwind | % | This should be set to 50% unless survey indicates a predominant direction relative to wind, e.g. for large-scale migration flights. |
| Description | Notes |
|---|---|
| Single transit risk (upwind) | The probability of collision for a bird flying through any point of the rotor at random. The values are respectively for upwind and downwind flight. |
| Single transit risk (downwind) | The probability of collision for a bird flying through any point of the rotor at random. The values are respectively for upwind and downwind flight. |
| Single transit risk (Weighted mean) | The mean of the above two values, weighted by the proportions of birds flying upwind and downwind. |
8. Stage D: Multiplying to yield expected collisions per year
Stage B estimated the likely number of flights through rotors across the wind farm; Stage C calculated the risk of collision for each single bird transit through a rotor. Stage D multiplies these together to yield an estimate of total potential collision risk, including a factor to allow for the proportion of time that the wind turbines are operational. This is before considering avoidance behaviour, which is stage E.
8.1 Non-operational time
Turbines do not operate all the time. A turbine may typically be at rest or idling for a considerable proportion of time, e.g. 15%, because the wind is too weak to generate power or, exceptionally, because the turbines have been shut down to avoid damage in high wind. There is also a requirement for some downtime for maintenance. This non-operational time is accounted for by the factor Qop representing the proportion of time the turbine is operational. If data is available, this factor should be stated monthly to reflect the different proportions of non-operational time at different times of year, for example, reflecting differing wind conditions across the year and increased access for maintenance during the summer.
| Symbol | Description | Units | Notes |
|---|---|---|---|
| Qop | Proportion of time turbines are operational | % | This includes down-time for maintenance as well as time inactive because of low-wind or storm conditions. If available, monthly data should be used as both wind conditions and accessibility for maintenance are seasonally dependent. If such data are not available, enter the year average for all 12 months. |
| Description | Notes |
|---|---|
| Collision rate before avoidance | The estimated collision rate, for each month and for the year, before any account is taken of avoidance. |
9. Stage E: Applying the avoidance rate
The preceding stages of the model assume that birds take no avoiding action in response to wind turbines. In reality, birds mostly take effective avoiding action to avoid collision with wind turbines. They may avoid the area of the wind farm altogether or they may use more indirect flight routes to bypass the wind farm. This is referred to as behavioural displacement, but it is also referred to as ‘macro’ or ‘far-field’. Alternatively, birds may continue to fly within or close to the wind farm, but exhibit behavioural avoidance also known as ‘micro’ or ‘near-field’ avoidance, choosing routes which pass between rotors. They may also fly higher or lower to avoid the rotors; or take emergency action in-flight to evade an approaching blade.
Monitoring at onshore wind farms is generating some useful information on levels of avoidance of some land-based bird species. Data is being derived from collision monitoring, based on regular site scans for bird corpses, and from observations of habitat use in the vicinity of wind farms. For many bird species, avoidance rates of 98% or higher have been observed, implying that the collision risk is less than 2% of that calculated from stages A-D alone. Avoidance is included in the collision risk model simply by multiplying the before-avoidance collision estimate by (1 - A) where (A) is the appropriate overall avoidance rate.
In general, the information for onshore species is not sufficient to discriminate in a quantitative way between macro-avoidance, i.e. displacement or far-field avoidance, and micro, or near-field, avoidance, though some Dutch studies are yielding useful data. As monitoring data builds up from constructed onshore wind farms, it may be possible to make more definitive predictions on rates of both macro and micro avoidance. The overall avoidance rate Aoverall is simply related to behavioural displacement (macro-avoidance) and behavioural avoidance (micro avoidance) rates:
(1 – Aoverall) = (1 – Amacro) x (1 – Amicro)
To obtain an overall avoidance rate in this way, information is needed on both macro- and micro-avoidance rates, each of which will be less on its own than the overall avoidance rate. In particular, if information on likely displacement is used to conclude that a proportion of birds will not use the wind farm site, that is, in effect, an application of the (1 – Amacro) factor. The avoidance rate then applied to those birds not displaced would then have to be a micro-avoidance rate Amicro, derived from monitoring observations solely of birds flying through wind farms. A micro-avoidance rate will be considerably lower than a rate for overall avoidance which includes displacement effects.
Where detailed information on macro- and micro-avoidance is not available, overall avoidance rates are best estimated by using monitoring data from existing wind farms, comparing actual mortality to that predicted if pre-construction levels of flight activity were maintained:

Equation
Click for a full description
The equation describes how to calculate overall avoidance rate where information on macro- and micro-avoidance in not available. This is calculated as one minus the actual collision rate as a proportion of the predicted collision rate if pre-construction levels of flight activity were maintained, i.e. dividing the former by the latter.
Care should be taken to ensure that the data on which such avoidance rates are based are on a consistent basis. This should include, for example, potential for changes in turbine model and flight risk heights as between those modelled in a collision risk assessment at the time of preparing an environmental statement and those actually built.
All current flight activity should be included within a wind farm collision risk estimate, and the avoidance rates used for collision risk estimates should be characteristic of overall avoidance, i.e. include both behavioural displacement (macro- or far-field avoidance) and behavioural avoidance (micro- OR near-field). In particular, the likelihood of displacement should be included as an aspect of overall avoidance. The potential direct impact of displacement on the bird population in terms of reduction in available habitat, should also be assessed elsewhere in the bird impact assessment.
The lack of firm evidence surrounding avoidance rates will almost certainly dominate the uncertainty inherent in the collision risk estimate. There is now substantial international experience on levels of avoidance from long-standing monitoring studies for a few land-based bird species, such that some confidence can be placed in the estimate of high levels of avoidance. It should be noted that avoidance behaviour may vary seasonally, and between groups of birds of the same species.
The collision risk estimate should conclude with a table showing potential collision mortality using a range of assumed avoidance rates. The text relating to this table should point to any evidence from existing post-construction monitoring on the respective or similar bird species which might indicate what levels of avoidance are best supported by evidence. In the absence of specific avoidance information for the species in question, it is recommended that collision risks be evaluated assuming avoidance rates of 95%, 98%, 99% and 99.5%.
9.1 Attraction
Consideration should be given to whether any habitat changes associated with developing the wind farm may result in attracting bird species. Any lighting on wind turbines may also have the effect of attracting birds at night. Where such attraction occurs, it follows that collision risk may be enhanced because of increased flight activity through the wind farm. Attraction is, in effect, a form of ‘negative displacement’ and could in principle be included in the collision risk assessment by including an appropriate negative component in macro avoidance. However, in most circumstances there is not enough definitive evidence to make quantitative predictions on attracting birds with any certainty.
Where, as part of an overall bird impact assessment, attention is drawn to the potential for a wind farm to attract birds, the potential for additional collision risk should also be considered.
9.2 Large turbine array correction factor
The model assumes that risks are additive, i.e. that a wind farm with 50 turbines will have 50 times the risk of a single turbine. Where a bird passes successively through two or more turbines, it is exposed to the same risk for each rotor transit. While it is possible that a bird encountering its first turbine may deviate to pursue a safer course through, above or around the wind farm, this is avoidance behaviour and therefore properly taken into account at Stage E rather than here. Stages A to D simply work out the consequences of birds taking no avoiding action2. Thus, if two turbines ‘overlap’ in the sense that the bird passes through both turbines in a single passage, no allowance is made for that overlap and the collision risk is the sum of the risk from each rotor passage.
More strictly, for large wind farms where the overall probability of a bird colliding is appreciable, it may be appropriate to take account of the fact that a declining proportion of the birds will survive passage through early rows of turbines and will thus be exposed to collision risk in later rows. This adjustment is only likely to be of any significance for large arrays of turbines.
Annex 9 sets out how such a correction may be made for a wind farm with approximately (n) rows of turbines. Very often the layout of a wind farm is not known at the time of collision risk assessment so an exact value for (n) is not known. In any case, the collision risk has to account for birds entering the wind farm from all directions. Sometimes the layout of the wind farm is irregular, lacking in clearly defined rows, but the principle remains that a declining number of birds will be exposed to collision risk if a proportion have already been killed by collision with earlier rotors as they pass through the wind farm. A reasonable and simple approximation is to use n = √ T, i.e. the square root of the total number of turbines.
Annex 9 includes a derivation of a ‘large array correction factor’, and a worked example. The ‘Large array correction’ sheet in the CRM spreadsheet provides a calculator for this factor. In the Collision Risk sheet, if ‘Allow for large array correction?’ is set to ‘Yes’, the sheet applies this correction factor to the output collision rates by multiplying each projected collision rate, for each of the various avoidance rates, by the appropriate correction factor. In most circumstances it will be evident that the difference made is minimal.
2 This position was confused by a reference in Band et al. (2007) to making a 50% allowance for overlapping turbines. It is now preferred that any amendment to collision risk resulting from avoidance behaviour should be built into the avoidance rate applied at the end of the calculation.
| Symbol | Description | Units | Notes |
|---|---|---|---|
| A | Avoidance rates to be used | % | The spreadsheet provides room for four avoidance rate options to be entered (the default set is 95%/ 98%/ 99%/ 99.5%). Each of these is used to calculate the likely collision rates allowing for avoidance. Use avoidance rates, if possible, which have been established from previous monitoring studies for this species, and an appropriate range to cover the uncertainties involved. |
| Symbol | Description | Units | Notes |
|---|---|---|---|
| - | Allow for large array correction? | - | Optional: enter ‘Yes’ or ‘No’. In most circumstances the correction is likely to be insignificant, so is better omitted for simplicity (‘No’). However, where it is significant, enter ‘Yes’. |
| w | Width of wind farm | km | If the large array correction is to be applied, it requires a value for the overall width of the wind farm in kilometres |
| Description | Notes |
|---|---|
| Large array correction factor % | If the large array correction factor is used, its values are listed and used to make an appropriate adjustment to the collision rates after allowing for avoidance. If it is not used, the factor is set to 100%. |
| Collision rates allowing for avoidance and (if used) the large array correction factor | The estimated collision rate after avoidance (and any large array correction, if applied) for each month and for a year is taken into account. The table shows the collision rates for each of the four specified avoidance rates. |
10. Stage F: Expressing uncertainty
In a collision risk estimate following the above method, there are many sources of variability or uncertainty in the output. The main sources of uncertainty are:
- survey data is sampled, often both in time and space, and usually exhibits a high degree of variability. Mean estimates can only be representative of flight activity;
- survey data is unavailable for certain conditions, including nighttime and storm conditions;
- natural variability in bird populations, over time and space, for ecological reasons;
- flight height information may be subject to observer bias;
- the collision risk model uses a simplified geometry for turbine blades and bird shape;
- it does not include any risk of collision with turbine towers;
- details of blade dimension and pitch may be unavailable when making the estimate;
- turbines deployed may differ from those used in the collision risk analysis;
- bird parameters (length, wingspan, flight speed) are not fixed but have a distribution;
- bird speed is not a constant but is dependent on wind speed;
- insufficient knowledge about bird displacement and attraction effects; and
- there is limited firm information on bird avoidance behaviour.
Perhaps the most important issue is to keep these uncertainties in proportion. For some of these uncertainties, e.g. bird density from survey data, the range of variability may be clear from the variability between different survey days. Observer bias in flight height estimates may be tested, for example by duplicating observers on occasion and comparing results. There are uncertainties in using the collision model itself, for example in using a single bird speed, or if the calculation is made for only one turbine speed rather than deriving an average over all turbine speeds. However, these uncertainties are likely to be less significant than the errors introduced by variability in the survey data input.
Then there is uncertainty over avoidance behaviour. At present there is only a handful of bird species for which collision mortality at onshore wind farms has been sufficiently monitored to enable an avoidance rate to be used with confidence. This uncertainty ranges over an order of magnitude. If an avoidance rate of 98% is used, for example, that may be judged subject to uncertainty covering a range from 95% to 99.5%, representing non-avoidance behaviour between 5% and 0.5%. For the foreseeable future, it seems likely that the uncertainties surrounding bird avoidance behaviour are likely to dwarf the errors and uncertainties arising from an inexact collision model or variability in survey data.
A similar position relates to the extent to which birds may respond to habitat changes caused by the wind farm. Here also there is insufficient experience yet to be able to predict with confidence likely levels of displacement or attraction in response to new habitats or, indeed, whether these patterns of behaviour will persist or change over time.
For these reasons it is proposed that uncertainty due to avoidance behaviour, and uncertainty over response to habitat changes, should be handled differently from uncertainties elsewhere in the calculation.
The output should convey the uncertainty in the collision risk estimate, by indicating, in addition to a ‘best estimate’, a range of confidence around that estimate. Though it is unlikely that these can be subject to detailed statistical analysis (with the exception of the survey data), the aim should be to express the range of uncertainty at around the 95% confidence level.
The range of uncertainty should reflect:
- uncertainty or variability in flight activity data (including imprecision on flight height estimates and lack of knowledge about night-time behaviour);
- uncertainty due to the limitations of the collision model, including the variability of bird dimensions and flight speed, the simplification in shape of a bird and turbine blades. As an expert guesstimate, the uncertainties arising from the collision model, if all required turbine parameters are fully available, may be of order ± 20%; and
- uncertainty arising from turbine options yet to be decided, in number, size and speed. These options should include a ‘worst case’ in terms of the option likely to present greatest bird collision risk.
The range of uncertainty due to each of these three sources should be separately identified and, as the three uncertainties are of independent origin, they may be combined to give an overall uncertainty of √ (u12 + u22 + u32), where u1, u2 and u3 are respectively the percentage uncertainties from each of these sources. Box 2 provides an example of how the uncertainties associated with a value for annual collision rate – other than the uncertainty in avoidance - might be expressed.
| Box 2. Example of presentation of uncertainty |
|---|
| (Note that the asterisked figures are chosen for example only and should be derived or judged from detailed consideration of the accuracies and uncertainties inherent in the input data.) Best estimate of annual collision rate (birds per annum) assuming 98% avoidance rate 147* Range of uncertainty due to variance and uncertainty in flight activity ± 50%* due to simplifications in collision model ± 20% due to design options yet to be finalised ± 15%* overall ± √(0.52 + 0.22 + 0.152) = 0.5 ± 56% range 65 - 230 |
Finally, the output should state the effect on the collision risk of a range of assumptions on avoidance. This should be covered by a statement conveying the status of current information on avoidance behaviour of the bird species in question, noting any variability in this behaviour and drawing conclusions about the likely collision risk. Box 3 suggests how the conclusions on annual collision rate might be presented to make clear the level of uncertainty over avoidance.
| Box 3. Example of presentation of uncertainty on avoidance |
|---|
| Species: XXXXXXX Best estimate of annual collision rate (birds per annum) assuming 95% avoidance 367 } 98% avoidance 147 } all subject to ± 56% 99% avoidance 73 } 99.5% avoidance 37 } 99.75% avoidance 18 } Information on avoidance for this species suggests 99% is most appropriate (refer to text in ES) but the lack of data means that the confidence interval may extend from 95% to 99.9%. |
The collision risk estimate should also outline qualitatively the possible likelihood and scale of any further collision risks which might result from the wind farm attracting birds.
References
Band, W., Madders, M. & Whitfield, D.P. 2007. Developing field and analytical methods to assess avian collision risk at windfarms. In: De Lucas, M., Janss, G. and Ferrer, M. eds. Birds and Wind Power. Servicios Informativos Ambientales/Quercus, Madrid, Spain.
Band, W. 2000. Windfarms and birds – calculating a theoretical collision risk assuming no avoiding action. Scottish Natural Heritage Guidance Note.
Band, W. 2012. Using a collision risk model to assess bird collision risks for offshore windfarms. Prepared for The Crown Estate as a component of their Strategic Ornithological Support Services (SOSS).
Bolker, E.D., Hatch, J.J., & Zara, C. 2006. Modelling bird passage through a windfarm. University of Massachusetts Boston, Boston, Massachusetts, USA.
BTO, n.d. Bird facts.
Cramp, S. & Simmons, K.E.L. 1983. Handbook of the birds of Europe, the Middle East and North Africa: The birds of the Western Palaearctic. Oxford University Press.
Forsythe, W.C., Rykiel, E.J., Jr, Stahl, R.S., Wu, H., & Schoolfield, R.M. 1995. A model comparison for daylength as a function of latitude and day of year. Ecological Modelling, 80(1), 87–95.
Holmstrom, L.A., Hamer, T.E., Colclazier, E.M., Denis, N., Verschuyl, J.P. & Ruché, D. 2011. Assessing Avian-Wind Turbine Collision Risk: an Approach Angle Dependent Model. Wind Engineering, 35(3), 289-312.
SNH, 2017. Recommended bird survey methods to inform impact assessment of onshore wind farms. Scottish Natural Heritage Guidance Note. Version 2.
SNH, 2018. Avoidance rates for the onshore SMH wind farm collision risk model. Scottish Natural Heritage Guidance Note. Version 2.
Tucker, V.A. 1996a. A mathematical model of bird collisions with wind turbine rotors. Journal of Solar Engineering, 118, 253-262.
Tucker, V.A. 1996b. Using a collision model to design safer wind turbine rotors for birds. Journal of Solar Engineering, 118, 263-270.
Wright, L.J., Ross-Smith, V.H., Massimino, D., Dadam, D., Cook, A.S.C.P. & Burton, N.J.K. 2012. Assessing the risk of offshore wind farm development to migratory birds designated as features of UK Special Protection Areas (and other Annex 1 species). The Crown Estate Strategic Ornithological Support Services (SOSS) report SOSS-05.
Whitfield, D.P. & Madders, M. 2006. Flight height in the hen harrier Circus cyaneus and its incorporation in wind turbine collision risk modelling. Natural Research Information Note 2.
Annexes
Annexes to this report can be downloaded as PDF documents by clicking on the links below.
Annex 2: Collision risk model spreadsheet (showing data for worked examples)
Annex 3: Assessing collision risks for birds on migration
Annex 4: List of input parameters
Annex 5: Relationship between bird flux and bird density
Annex 6: Combining data from more than one vantage point
Annex 7: Single transit collision risk
Annex 8: Calculating a mean rotor speed
Annex 9: Large array correction
A worked example of the approach described is presented in Annex 10. However, one risk of a prescriptive method is that it could stifle innovation in improved methods. Developers and their advisors are encouraged, where appropriate, to go beyond the core requirements set out in this report but, where they do so, the standard approach of this report should also be pursued to make clear how the results of any improved methods differ from that of the standard approach.
Last updated:






